Ethernet/IP
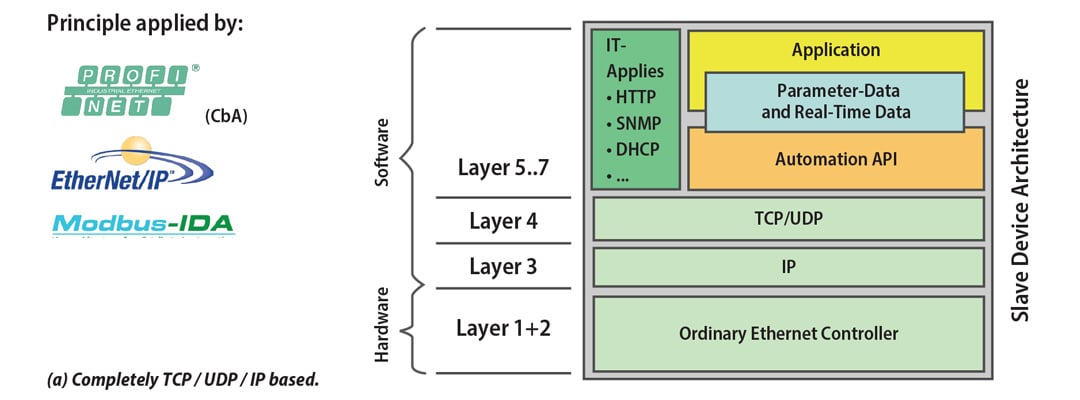
EtherNet/IP is an industrial Ethernet protocol originally developed by Rockwell Automation that is now managed by the Open DeviceNet Vendors Association (ODVA). Unlike EtherCAT, which is a MAC-layer protocol, EtherNet/IP is an application-layer protocol built on top of TCP/IP. EtherNet/IP uses standard Ethernet physical, data link, network and transport layers, while using the Common Industrial Protocol (CIP) on top of TCP/IP. CIP provides a common set of messages and services for industrial automation control systems, where it can be used with multiple physical layer media. For example, CIP over CAN bus is called DeviceNet, CIP over a dedicated network is called ControlNet, and CIP over Ethernet is called EtherNet/IP. EtherNet/IP establishes communication from one application node to another through CIP connections over a TCP connection; multiple CIP connections can be established over one TCP connection.
EtherNet/IP uses standard Ethernet with switches, thus it can have an unlimited number of nodes in a system. This enables one network across many different end points in a factory floor. Ethernet/IP offers complete producer-consumer service and enables very efficient slave peer-to-peer communications. EtherNet/IP is compatible with many standard Internet and Ethernet protocols, but has limited real-time and deterministic capabilities without careful network planning.
PROFINET
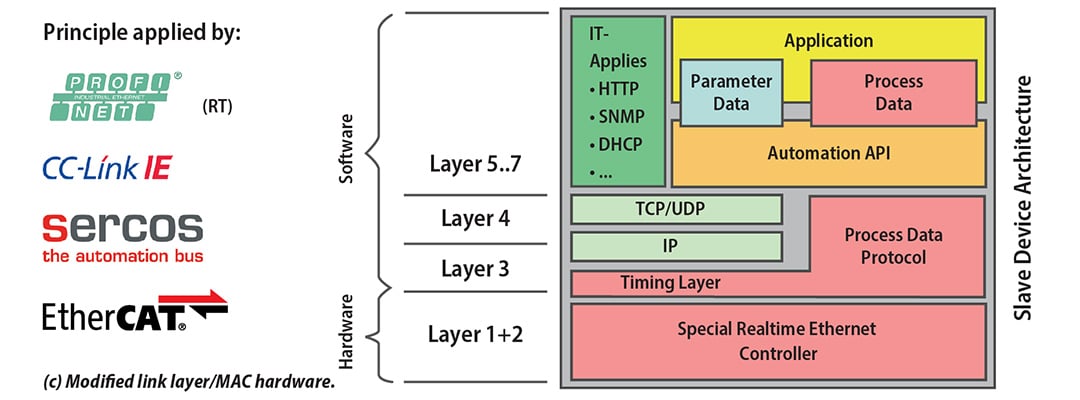
PROFINET is widely used by major industrial equipment manufacturers such as Siemens and GE. It has three different classes: (1) PROFINET Class A provides access to a PROFIBUS network through proxy, bridging Ethernet and PROFIBUS with a remote procedure calling on TCP/IP. Its cycle time is approximately 100 ms, and is primarily used for parameter data and cyclic I/O. The typical application includes infrastructure and building automation. (2) PROFINET Class B, also referred as PROFINET Real-Time (PROFINET RT), introduces a software-based real-time approach and has reduced the cycle time to approximately 10 ms. Class B is typically used in factory automation and process automation. (3) PROFINET Class C (PROFINET IRT), is Isochronous and real-time, requiring special hardware to reduce the cycle time to less than 1ms to deliver sufficient performance on the real-time industrial Ethernet for motion control operations.
PROFINET RT can be used in PLC-type applications, while PROFINET IRT is a good fit for motion applications. Branch and Star are the common topology used for PROFINET. Careful topology planning is required for PROFINET networks to achieve the required performance of the system.
EtherCAT
EtherCAT was originally developed by Beckhoff to enable on-the-fly MAC packet processing and deliver real-time Ethernet to automation applications. It can provide scalable connectivity for entire automation systems, from large PLCs all the way down to the I/O and sensor level.
EtherCAT is a protocol optimized for process data, using standard IEEE 802.3 Ethernet Frames. Each slave node processes its datagram and inserts the new data into the frame while each frame is passing through. The process is handled in hardware (at the MAC layer) so each node introduces minimum processing latency, enabling the fastest possible response time. EtherCAT is a MAC layer protocol and is transparent to any higher level Ethernet protocols such as TCP/IP, UDP, Web server, etc. It can connect up to 65,535 nodes in a system. The EtherCAT master can be a standard Ethernet controller, thus simplifying the network configuration. Due to the low latency of each slave node, EtherCAT delivers flexible, low-cost and network-compatible industrial Ethernet solutions.
SERCOS III
Sercos III is the third generation of Serial Real-time Communication System (Sercos). It combines on-the-fly packet processing for delivering real-time Ethernet with standard TCP/IP communication to deliver low latency industrial Ethernet. Much like EtherCAT, a Sercos III slave processes the packet by extracting and inserting data to the Ethernet frame on-the-fly to achieve low latency. Sercos III separates input and output data into two frames. With cycle times from 31.25 microseconds, the speed rivals that of EtherCAT and PROFINET IRT. Sercos supports ring or line topology. Sercos III is limited to 511 slave nodes in one network and is most used in servo drive controls.
CC-Link IE
CC-Link IE is the industrial Ethernet technology of CC-Link, which was originally developed by the Mitsubishi Electric Corporation. CC-Link IE has two versions: CC-Link IE Control and CC-Link IE Field. CC-Link IE Control is intended for controller-to-controller communications and is limited to 120 nodes per network. CC-Link IE Field is intended for I/O communications and motion control, and is limited to 254 nodes per network. CC-Link IE leverages the Ethernet data link layer, and its control frames are directly embedded in the Ethernet frame. Only ring topology is supported in CC-Link, without switches. This can provide network redundancy, but only a limited number of nodes can be supported in a network, and the cycle time is dependent on the number of the nodes in the network.
Powerlink
POWERLINK was originally developed by B&R. Ethernet POWERLINK is implemented on top of IEEE 802.3 and, therefore, allows a free selection of network topology, cross connect and hot plug. It uses a polling and time slicing mechanism for real-time data exchange. A POWERLINK master or Managed Node controls the time synchronization through packet jitter in the range of tens of nanoseconds. Such a system is suitable for all kinds of automation systems ranging from PLC-to-PLC communication and visualization down to motion and I/O control. Barriers to implement POWERLINK are quite low due to the availability of open-source stack software. In addition, CANopen is part of the standard which allows for easy system upgrades from previous fieldbus protocols.
Modbus /TCP
Modbus /TCP is an extension of serial Modbus®, and was originally developed by Schneider Electric. It uses serial Modbus messaging over TCP/IP on top of Ethernet. Modbus/TCP is simple to implement on the standard Ethernet network, but it does not guarantee real-time and deterministic communications: it is a non real-time approach to networking within the industrial environment. It does not guarantee arrive times or cycle times nor provide precise synchronization. Performance is a strong function of the underlying TCP/UDP/IP stack implementation.
Future Trends
As the third industrial revolution dawns, industrial automation will again drive the world economy. The success of industrial automation depends on a reliable and efficient communication network that connects all components of the factory seamlessly working together. The popularity and ubiquity of Ethernet will continue to motivate the legacy factory to upgrade to Industrial Ethernet. Many different Industrial Ethernet protocols have been implemented in the field, each with its strengths and weaknesses. Future Industrial Ethernet protocols will continue to evolve and converge to deliver hard real-time, deterministic communication links with better reliability and integrated safety. For more information on the EPC absolute Ethernet product line, please visit EPCs Encoders for Industrial Ethernet overview page.