2. Cable Considerations
Cable Lengths
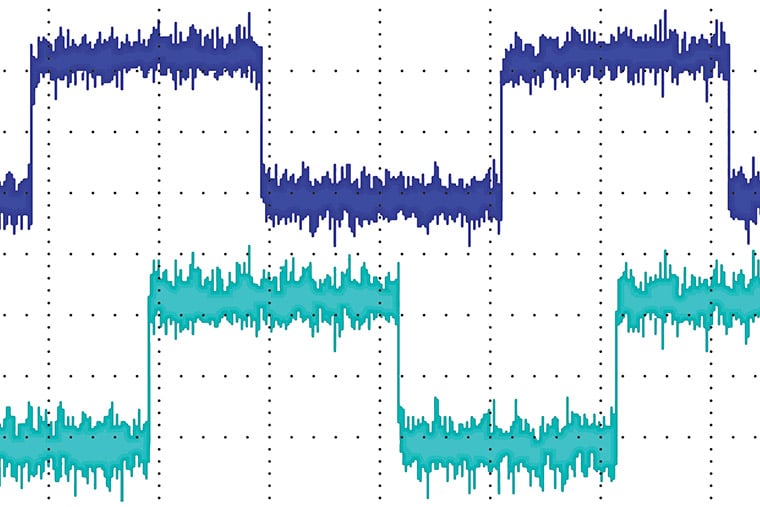
All cables have small amounts of capacitance between adjacent conductors. This capacitance is a direct function of the cable’s length, and tends to round off the leading edge of the square wave signal, increasing rise times. It can also distort the signal to the extent of causing errors in the system.
Signal distortion is not usually significant for lengths less than 30 feet (or 1000 picofarads). To minimize the distortion, use low capacitance cable (less than 30 picofarads per foot), in the shortest length possible for the application. To minimize distortion for cable lengths in excess of 30 feet, use differential line driver outputs, along with differential type receiver circuitry.
Also, a low capacitance twisted-shielded pair cable should be used whenever using differential signals. For high frequency applications (> 200kHz), this type of cable may be needed for all lengths.
Cable Termination
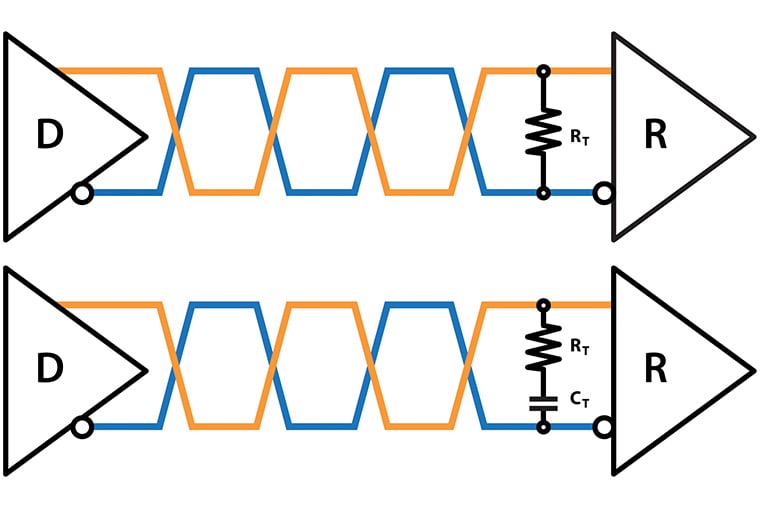
Proper cable termination is vital with differential signals. With an un-terminated configuration, signal reflections can occur, resulting in severely distorted waveforms. If signal distortion occurs, try parallel termination, which involves placing a resistor across the differential lines at the far (receiver) end of the line. The parallel termination resistor value (RT) should match the characteristic impedance (ZO) of the cable, typically 70-150 Ω. This permits higher frequencies to be transmitted without significant distortion.
It is usually better to select a value for RT that is slightly larger (up to 10% larger) than ZO, as over-termination tends to improve signal quality better than under-termination.
Unfortunately, low valued resistors can increase the power dissipated by the line driver, and reduce output signal swing. In this case, a capacitor should be placed in series with the resistor. The capacitor value should be equal to the round trip delay of the cable divided by the cables cable’s ZO. Round trip delay is equal to two times the cable length multiplied by 1.7ns/ft.
CT ≤ Round Trip Delay / ZO
Example:
Cable Length = 100 ft
Signal Velocity = 1.7 ns/ft
ZO = 120 Ω
CT ≤ (100ft x 2 x 1.7ns/ft) / 120 Ω
CT ≤ 3,000 pF
Note that the RC time constant of this type of termination can reduce the system frequency response.
A parallel termination resistor value larger than listed above can often provide adequate reduction of signal reflections, and still maintain adequate frequency response, and low power dissipation. Experimentation is often required for each application consisting of long cable runs and high frequencies.
Cable Connection
It is important to connect cable shields to ground on the instrument end (counter, PLC, etc.). Always properly ground the motor/machine for which the encoder is mounted. Also, ground the encoder case under the following conditions:
(1) DO NOT ground the encoder case through both the motor/machine and the cable wiring, and
(2) DO NOT allow the encoder cable wiring to ground the motor/machine exclusively. High motor/machine ground currents could flow through encoder wiring, potentially damaging the encoder and associated equipment.
Additional Methods to Reduce Noise
There are several additional methods that can reduce noise in an encoder’s electrical signal:
- Route power and signal lines separately.
- Twist and shield signal lines, and place signal lines at least 12 inches from other signal lines and from power leads.
- Maintain signal wire continuity from the encoder to the controller/counter (i.e., avoid junctions or splices).
- Provide clean regulated power to encoder and associated equipment (± 2%).
- Ensure equipment (motors, drives, shafts, etc.) is properly grounded.
- Connect encoder cable shield to ground at controller/counter end, leaving the end near the encoder disconnected.
- If possible, use differential line driver signal outputs with high-quality twisted, shielded pair cable. The complimentary signals greatly reduce common mode noise levels, as well as signal distortion resulting from long cable lengths.
Conclusion
If you follow the recommendations given here, you will see a reduction in noise and signal distortion in your encoder. If you still have questions about installation, signal clarity, or anything else encoder-related, give us a call. When you contact EPC, you talk to real engineers and encoder experts who can answer your toughest encoder questions. You’ll get the answers that make sense for your application.