Electrical Output
There are four major types of electrical output:
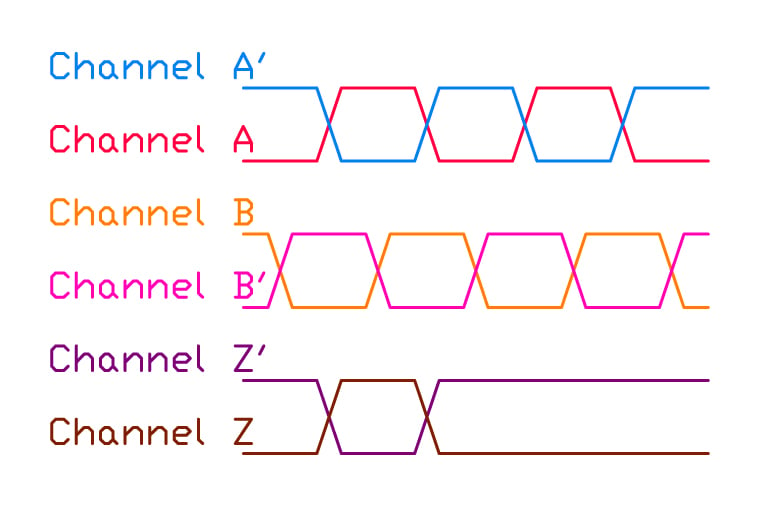
Differential Line Driver
With differential signals, there will be two connections for each channel (see Figure 5). It provides differential output, or complementary signals for noise immunity. Noise immunity is obtained by what is called “common mode rejection,” which occurs when noise is present on a differential pair, and the differential receiver cancels the noise. Differential line driver is the preferred output type for longer encoder cable lengths because of the inherent noise immunity. Differential line driver also meets RS-422 standards when operated at 5 VDC. An encoder should have differential line drive outputs when the receiving device is set up to receive differential signals. Some Accu-Coder® encoders also have a 5 VDC regulated differential line driver output. This will take a higher input voltage and regulate the output to 5 VDC.
Push-Pull
Push-pull is sometimes referred to as a “totem-pole” type of output circuit. This is a combination of sinking and sourcing outputs. When the output is in logic state high, current will source to the receiving device load. When the output is in logic state low, current will sink from the load.
Push-pull does not have the noise immunity that is inherent in a differential line driver. When the output is high, the noise on the DC power supply (ripple, voltage, spikes, etc.) may show up on the output of the encoder. A push-pull output type can replace a PNP transistor output in some applications. Some encoders have a 5 volt regulated push-pull output, so the encoder will have a 5 volt signal when the supply voltage to the encoder is higher than 5 volts.
NPN Open Collector
NPN open collector is a current sinking output type and requires a pull-up resistor external to the encoder. Typically, the pull-up resistor is built into the receiving device.
Open collector is useful for doing what is called level shifting. Level shifting occurs when the encoder is pulled up externally to a different voltage level. For example, the encoder can be powered with 5 volts, and the output can be pulled up to a 24 VDC level. Encoder Products Company offers an open collector differential output on some encoder models. This is an open collector output with the complimentary channels similar to a line driver.
It should be noted that NPN open collector is not the same as a PNP output. A PNP output requires a pull down resistor and is a current sourcing type output. PNP outputs are seldom used in encoders.
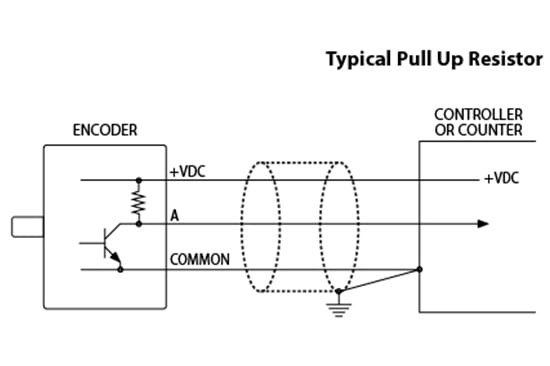
Pull-Up
Pull-up is the same as the open collector, but, as the name implies, it contains the pull-up resistor internal to the encoder. This is useful for customers who do not need the level shifting capabilities of an open collector and do not want to add external pull-up resistors to the feedback system. Common values for the internal pull-up resistor in an EPC Accu-Coder® encoder are between 1.5k and 2.2k.