More than half of all the electricity used by US industrial plants goes to power electric motors; they’re found in nearly every manufacturing plant and commercial operation. Consequently, the most common application of encoders is for the control of speed and direction of electric motors, from small frame steppers to large AC induction vector-duty NEMA motors. Today’s sophisticated drives and control systems can use feedback from a single motor mount encoder to control multiple axes of motion.
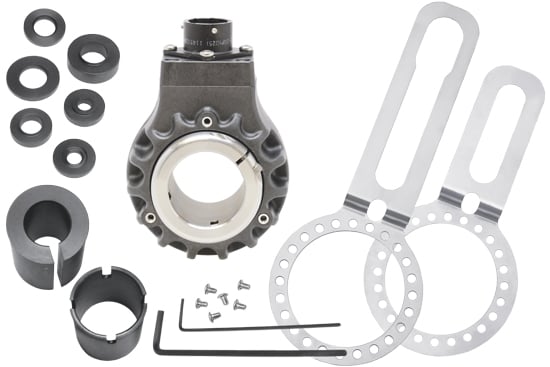
Mechanical integration
Mechanically, shaft encoders mount directly to the motor via a bell housing, and attach to the shaft via a flexible coupling. Also, a shaft encoder also can be indirectly applied to the motor via a chain and sprocket or belt and pulley. In recent years, most motor manufacturers have opted for thru-bore or hollow bore encoders due to the compact design and reduced bearing loads. In this case the encoder attaches to the motor via a thin, flexible 1, 2, or 3-point flex-mount, while the encoder is fixed to the shaft via a collar. C-Face encoders have flange and bolt circle features that permit direct application to C-Face motor surfaces, providing a seamless, integrated encoder/motor assembly.